変形型月面ロボット「LEV-2」(SORA-Q)による 月面実証成果の国際学術誌「Science Robotics」論文採択
株式会社タカラトミー
更新日時:6月18日 19時28分
― 自律運用の解析結果と新たな月面画像の公開 ―
変形型月面ロボット「LEV-2」による 月面実証成果の国際学術誌「Science Robotics」論文採択 ― 自律運用の解析結果と新たな月面画像の公開 ―
変形型月面ロボット「Lunar Excursion Vehicle 2(LEV-2)」、愛称「SORA-Q(ソラキュー)」に関する研究成果をまとめた論文が、アメリカの国際学術誌「Science Robotics」において表紙に採用されるとともに、2026年6月10日(日本時間6月11日午前3時)に掲載されましたのでお知らせいたします。
記
タイトル :球体からローバへ:自律月面探査を達成した変形型月面ロボットSORA-Q
原題 :From ball to rover: Transformable palm-sized rover SORA-Q for autonomous
lunar exploration
掲載誌 :Science Robotics
DOI :10.1126/scirobotics.aec8039
※表紙画像は以下URLのプレスリリース参照
https://www.takaratomy.co.jp/product_release/pdf/p260618.pdf
発表のポイント
LEV-2が実際に月面を移動したことを裏付ける2枚目の月面画像を新たに公開する。
球体(直径約8cm)から走行形態へ変形する独自の仕組みにより、手のひらサイズの超小型ローバでも月面を移動可能なことを明らかにした。
地上からの遠隔操作に頼らず、自ら判断して移動・撮影・通信する自律制御技術を実証した。
低コスト・短期間で開発可能な超小型ロボットによる新しい宇宙探査の可能性を示した。
概要
LEV-2は、2024年1月に小型月着陸実証機「SLIM」(以下、「着陸機」)から分離され、月面に到達しました。直径約8cmの球体から自動で展開し、車輪で移動しながら周囲の撮影を行い、取得した画像を無線で送信することに成功しました。これらの一連の動作は、地上からの操作なしに自律的に行われました。
本研究では、小型ロボットで課題となる移動能力や処理能力の制約を克服するための機構設計と自律制御技術を提案し、月面でその有効性を実証しました。
内容
1. 研究の背景
これまでの月や火星の探査では、大型で高機能なローバが使われてきましたが、開発や打ち上げにかかるコストが大きいという課題がありました。一方で、小型ローバは低コストで投入できる利点がありますが、移動能力や処理能力、電力などが限られるため、実用化には多くの課題がありました。特に月面のような柔らかい地面では、小さな車輪では沈み込みやすく、移動が難しいことが知られています。また、通信が不安定な環境では、地上からの操作に頼らず、自律的に判断して動く能力が不可欠です。こうした背景から、小型でも高い移動能力と自律性を備えたロボットの開発が求められていました。
2. 成果
本研究では、月面での実証運用を通じて以下の成果を得ました。あわせて、月面画像を新
たに公開します。
(1)完全自律による月面探査の実証
LEV-2は、着陸後に自ら起動・展開し、姿勢を整えた後、着陸機から離れて移動しながら撮影を行いました。撮影した画像の中から重要なものを自ら選び、無線で送信するなど、一連の動作をすべて自律的に行いました。これらの動作は、通信が限られる環境を前提として設計されており、地上からの遠隔操作に依存せずに実施されました。その結果、月面上から2枚の画像の取得に成功しました。図1は、フロントカメラで撮影された画像であり、通信途中でデータが途絶えたため、一部が欠けた状態となっていますが、着陸機とその周囲の様子が明瞭に捉えられており、月面での着陸状況を示す貴重なデータとなりました。テレメトリデータの解析から、LEV-2がオンボード画像処理により月面で着陸機を正しく認識していたことも確認されました。また、オフライン画像解析の結果、LEV-2が着陸機から約5.08m離れた位置から撮影したと推定され、計画された動作シーケンスが適切に実行されていたことが示されました。
図2は、リアカメラで撮影された画像で、今回新たに公開するものです。通信途絶によるデータ欠損のため、復元されたのは左側部分のみとなっていますが、月面環境や移動の根拠を示す重要な情報が含まれていました。後述する画像解析により生成した投影画像(フロントカメラ画像をリアカメラ撮影時の視点に変換したもの)との比較から、欠損した中央部分に着陸機が写っていた可能性が高いことが示されました(フロントカメラとリアカメラの位置は図3に示しています)。また、テレメトリデータの解析から、LEV-2は月面で少なくとも約108分間動作し、その間にオンボード画像処理を240回実施したことが明らかになりました。さらに、月面移動中には姿勢異常を検知し、姿勢を回復させる動作シーケンスが実行されたことも確認されています。これらにより、超小型ロボットが厳しい通信制約下においても、自律的に判断して探査を実行し、その成果を取得・送信できることを実証しました。
【画像:https://kyodonewsprwire.jp/img/202606181053-O3-VR821w9J】
図1: LEV-2がフロントカメラで撮影した月面の画像 (赤枠は月面で着陸機を検出した結果を示しており、画像処理アルゴリズムが月面でも正常に動作したことを裏付けている) ©JAXA/タカラトミー/ソニーグループ(株)/同志社大学
【画像:https://kyodonewsprwire.jp/img/202606181053-O4-efTYM1Mw】
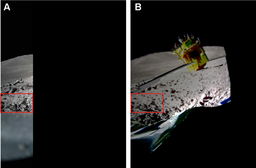
図2: (A) LEV-2がリアカメラで撮影した月面の画像
(B) フロントカメラ画像(図1)をリアカメラ撮影時の視点に変更した投影画像
(赤枠で示した範囲に共通する岩石が写っており、この情報をもとにLEV-2の移動・旋回量を推定 Aのデータ欠損部には、Bのように着陸機が写っていた可能性が高いと考えられる) ©JAXA/タカラトミー/ソニーグループ(株)/同志社大学
【画像:https://kyodonewsprwire.jp/img/202606181053-O5-9c1o6hKx】
図3: LEV-2の外観(左:収納状態、右:展開状態) ©JAXA/タカラトミー/ソニーグループ(株)/同志社大学
(2)変形機構・偏心車輪による移動機能の実証
LEV-2は、球体形状から展開して走行形態へ変形する独自の仕組みと、月面でも埋もれないように車輪を偏心回転させる特殊な機構を備えています。今回取得された2枚の画像には、共通して写っている岩石が存在します。この岩石を基準に画像解析を行った結果、2枚の画像を取得する間にLEV-2が約0.13m移動し、約180度旋回していることが確認され、LEV-2が実際に月面上を移動・旋回したことが裏付けられました。これにより、提案した変形機構および車輪の偏心回転が、実際の月面環境において有効に機能し、超小型ロボットでも走行できることを実証しました。
(3)実環境での動作データと知見の獲得
月面での運用では、通信の途切れやデータの一部欠損といった課題が確認されました。一方で、LEV-2に搭載された異常検知機能や自己回復機能が実際に動作し、不具合に対して自律的に対応していたことも確認されました。これらの結果から、実際の宇宙環境で小型ロボットを運用するための設計や地上試験に関する留意点、運用方法の改善点など、今後の探査ミッションに活用可能な具体的知見が得られました。
3. 今後の展開
今回の成果は、小型ロボットによる宇宙探査の実現可能性を示す重要な一歩です。今後は、以下のような展開が期待されます。
複数の小型ロボットを同時に運用し、広範囲を効率的に探査する技術の発展
大型ローバと小型ロボットを組み合わせた柔軟な探査システムの実現
月や火星だけでなく、洞窟や急斜面などこれまで到達が難しかった環境への探査拡大
低コスト・短期間でのミッション実現による宇宙探査の加速
本研究で得られた技術と知見は、将来の月・火星探査に加え、人類の宇宙活動の拡大に
貢献することが期待されます。
論文情報
掲載誌 :Science Robotics
DOI :10.1126/scirobotics.aec8039
タイトル :From ball to rover: Transformable palm-sized rover SORA-Q for autonomous
lunar exploration
著者 :D. Hirano1,2, M. Inazawa2, M. Sutoh1, M. Nagata3, Y. Yoneda4, K. Watanabe5,
H. Sawada1, G. Sakoda3, S. Abe6, S. Homma6
1Space Exploration Innovation Hub Center, Japan Aerospace Exploration Agency, Japan.
2Research and Development Directorate, Japan Aerospace Exploration Agency, Japan.
3Exploratory Deployment Group, Sony Group Corporation, Japan.
4Technology Development Division, TOMY Company, Ltd., Japan.
5Faculty of Life and Medical Sciences, Doshisha University, Japan.
6AI&DX Technology Division, Sony Semiconductor Solutions Corporation, Japan.
※論文初回投稿時の所属
以上
関連情報
変形型月面ロボット(Lunar Excursion Vehicle 2(LEV-2)愛称「SORA-Q」)
宇宙探査イノベーションハブ
変形型月面ロボット(Lunar Excursion Vehicle 2(LEV-2)愛称「SORA-Q」)について
本ロボットは、国立研究開発法人宇宙航空研究開発機構(以下「JAXA」)、株式会社タカラトミー、ソニーグループ株式会社、同志社大学の4者で共同開発しました。2023年9月7日に小型月着陸実証機「SLIM」に搭載され、H-IIAロケット47号機により種子島宇宙センターから打ち上げられました。2024年1月20日に月面での撮影に成功し、世界最小・最軽量の月面探査ロボット(直径78mm/変形前、質量228g)となりました。また、共にSLIMに搭載された超小型月面探査ローバ「Lunar Excursion Vehicle 1(LEV-1)」と合わせて、世界初の完全自律ロボットによる月面探査、世界初の複数ロボットによる同時月面探査を達成しました。(JAXA調べ。2024年1月25日時点)。

クロール走行中 変形型月面ロボット「SORA-Q」 (2)

バタフライ走行中 変形型月面ロボット「SORA-Q」 (2)

(拡張変形)変形型月面ロボット「SORA-Q」 (2)

(球体のまま着陸)変形型月面ロボット「SORA-Q」 (2)

220310soraq_1010

220310soraq_1005

変形型月面ロボット「SORA-Q」変身前(左)変身後(右)s

野球ボールとのサイズ比較

手のひらサイズの変形型月面ロボット「SORA-Q」 (1)